
Compartir
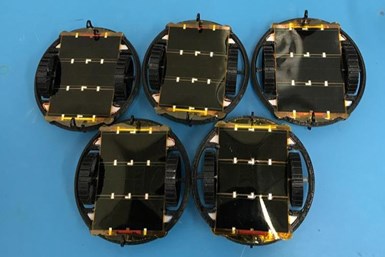
La estructura mecánica de los robots fue manufacturada aditivamente con recubrimientos metálicos y cortes láser para confección de PCB 3D. Crédito: Agencia Espacial Mexicana.
A bordo de la nave Peregrine Lunar Lander, la misión Proyecto Colmena, con cinco microrrobots mexicanos, despegó desde Cabo Cañaveral, Florida, y se espera que arribe a la Luna en un plazo de 4 a 6 semanas.
El Proyecto Colmena es el primero de su tipo en Latinoamérica, en el que participaron aproximadamente 250 estudiantes liderados por el Dr. Gustavo Medina Tanco, y desarrollado en el Laboratorio de Instrumentación Espacial (LINX), del Instituto de Ciencias Nucleares de la UNAM.
De acuerdo con la Agencia Espacial Mexicana (AEM), el Proyecto Colmena es la primera de tres misiones espaciales que realizará México antes de 2030 a la Luna, con el objetivo de construir y operar, en forma autónoma, grandes enjambres de micro robots sobre las superficies expuestas al medio interplanetario y asteroides.
En esta primera fase serán transportados cinco microrrobots con innovaciones únicas para realizar estudios de exploración.
Destacan la microrrobótica para operación en condiciones de espacio y en el polvo lunar o regolito; navegación autónoma; nuevas formas de obtención de energía; sistemas de mitigación pasiva de altas y bajas temperaturas y rápida transición entre ellas.
Además, se abordará la supervivencia a condiciones de radiación extrema utilizando nuevos materiales; electrónica y sensores embebidos en polímeros manufacturados aditivamente, y recuperación de minerales con alto valor agregado en la Luna y en asteroides.
De acuerdo con LINX el proyecto cuenta con los siguientes sistemas:
- TTDM: Módulo de telemetría, telecomandos y despliegue, con masa total inferior a 140 gramos:
- Electrónica: PCB único, flexible que contiene los siguientes subsistemas. acondicionamiento de potencia, control, comunicaciones, monitoreo, conector de interfaces, armado y disparo, mecanismo de corte, conexión a tierra y bonding.
- Estructura mecánica: anclaje mecánico al Lander, mecanismo de soporte y despliegue (brazo de catapulta), cazoleta, cofia y encordado.
- Interfaces con el Lander: mecánicas (cuatro tornillos para vibración) y eléctricas (potencia, ON/OFF, disparo, TM/TC, tierras y bonding
- Electrónica: PCB único, flexible que contiene los siguientes subsistemas. acondicionamiento de potencia, control, comunicaciones, monitoreo, conector de interfaces, armado y disparo, mecanismo de corte, conexión a tierra y bonding.
- Robots: sistema de nueve unidades independientes, reversibles (i.e. simétricos respecto del plano medio), de 40 gramos cada una y con dimensiones externas totales de 83.5 mm x 38 mm:
- Estructura mecánica: es manufacturada aditivamente, con recubrimientos metálicos y cortes laser para confección de PCB 3D y consta de toroide hueco en forma semejante a un engranaje compuesto de tres capas paralelas, estructuras honey-comb para soporte de paneles solares y de motores, dos ruedas con motores independientes, cuatro flotadores deslizantes para regolito.
- Electrónica: PCB único que contiene: sistema de potencia, regulación de voltaje, sistema de potencia de emergencia (Dt > 60 seg), computadora de bordo, sistema de comunicación y sensores de intensidad direccionales de campo en nueve bandas diferentes de 20 kHz de ancho entre 2473 y 2495 MHz, sensores de corriente, voltaje, temperatura, emisor de campo magnético a 20Hz, giróscopos, acelerómetros y magnetómetros 3D y conectores eléctricos omnidireccionales.
- Sistema de ocho paneles solares de última generación de Arseniuro de Galio.
- Estructura mecánica: es manufacturada aditivamente, con recubrimientos metálicos y cortes laser para confección de PCB 3D y consta de toroide hueco en forma semejante a un engranaje compuesto de tres capas paralelas, estructuras honey-comb para soporte de paneles solares y de motores, dos ruedas con motores independientes, cuatro flotadores deslizantes para regolito.
La Agencia Espacial Mexicana dice que este proyecto permitirá formar recursos humanos altamente calificados en el sector espacial, que servirán como atractivo para la implementación de empresas de alta tecnología en el país, que puedan detonar la generación del sector espacial y desarrollar empresas unicornios mexicanos.
“El Proyecto Colmena coadyuva de manera importante a desarrollar capacidad tecnológica buscando que el ingenio mexicano ocupe un lugar relevante en la transformación espacial que se espera en la década de 2030. En este momento, su estrategia principal es la microrrobótica, utilizando máquinas autónomas para realizar tareas en ambientes espaciales hostiles”, refiere la información.
Cabe señalar que esta misión cuenta con el apoyo de AEM, CONACyT y UNAM, y que la nave Peregrine Lunar Lander fue sacada de la superficie terrestre por el cohete United Launch Alliance (ULA) Vulcan-Centaur.
CONTENIDO RELACIONADO
-
COVID-19: INEGI revela impacto sobre actividad económica y mercado laboral en México
De las empresas mexicanas incluidas en el estudio (ECOVID-IE), poco más de la mitad implementaron paros técnicos como medida de prevención, 93.2 % registró al menos un tipo de afectación y la mayoría priorizó el no despido de personal sobre la reducción de remuneraciones y/o prestaciones.
-
Perspectivas para la industria manufacturera mexicana en 2022
Con el objetivo de recuperar e impulsar el crecimiento a largo plazo de la industria en México, es importante fomentar condiciones de certidumbre para la inversión y la actividad productiva.
-
Los clústeres industriales y la recuperación de la industria en 2022
La relocalización de muchas líneas de producción hacia Mexico ha incrementado la actividad manufacturera en todas las regiones del país.